いわゆるクアッドコプタ(クアッドロータ).
名前は『4倍の』という意味の英単語__quadruple__と,『猛禽類』という意味の英単語__raptor__と,__quadcopter__の3つの単語を掛けあわせてできたものである.



仕様
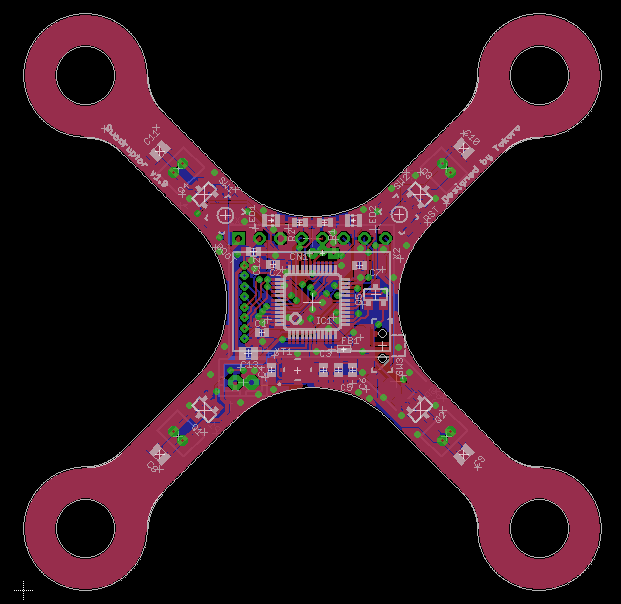
Quadruptor(2013.12〜)
| サイズ | 90 x 90 x 25 [mm x mm x mm] |
| 重量 | 28g(バッテリー含む) |
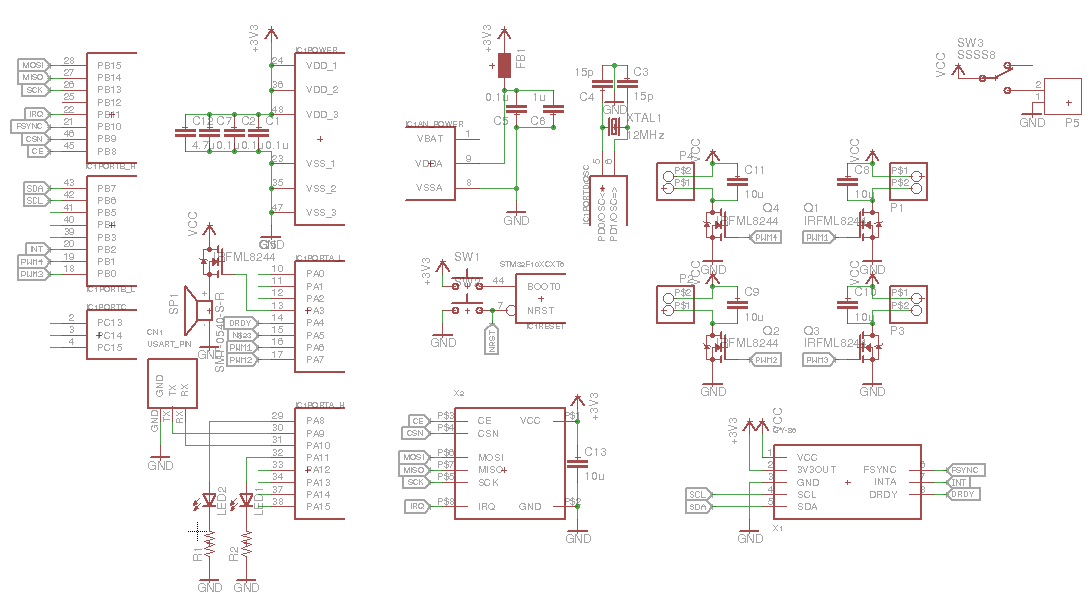
| マイコン | STM32F103@48MHz |
| モータ | 7mmコアレスDCモータ(ブランド不明) |
| モータ駆動方式 | 1モータあたりMOSFET1石 単方向回転PWM駆動 |
| センサモジュール | GY-86(MPU-6050,HMC5883L,MS5611) |
| インタフェース | UART |
| 制作費 | 約4000円/個 |
開発環境
stm32plusを使うソースコード
このプロジェクトはBitbucketで管理しています.
tokoro10g / Quadruptor ― Bitbucket
資料
超小型クアッドロータ “Quadruptor” の製作とその制御, 東京工業大学ロボット技術研究会 第59回 研究報告会 報告書 (PDF,約2.0MB)
スライド
ハードウェア関係技術情報
基板
回路図